嵌入式系统与设计方法学
未经测试的模块都是错误的 错误必须尽早解决 模块的选用与系统的优化必须基于评估
什么是嵌入式系统
Embedded computing system: Any device that includes a programmable computer but is not itself a general-purpose computer
- 嵌入式系统的组成:
- 模拟元件: sensors, actuators, etc.
- ADC/DAC
- 数字元件: processors, Coprocessors, Memories, Buses; Controllers, Application Specific Hardwares
- 软件: Operating Systems, Middleware, Applications
基于MCU的设计简单,而且考虑到MCU本身的性能一般效果也不错;也可以用FPGA定制;Heterogeneous systems用定制逻辑完成特定功能,用MCU完成其他功能
- 嵌入式系统具有功能复杂、实时性、低成本、低功耗、设计周期短等特点
- 实时性: 软实时 (soft real-time), 硬实时 (hard real-time), ?(firm)
怎么设计嵌入式系统
例如,需求即应用场景、功能、指标描述,规格类似manual,在此基础上绘制架构框图,划分层次、模块,设计功能,最终集成
graph LR;
A[requirements]
B[specification]
C[architecture]
D[component design]
E[system integration]
A-->B;
B-->C;
C--topdown-->D;
D-->E;
D--bottomup-->C;
- trade-offs:
- 设计本身: power(energy), performance(?), manufacturing cost
- 开发过程: time-to-market, design cost
- 使用过程: flexibility, reliability, scalability, complexity, etc.
- methodology
- 软件开发:
- waterfall model:
requirement <-> arch <-> code <-> test <-> maintenance - spiral model: 在每个阶段
requirement + design + test - successive refinement model: 不断修正
spec -> arch -> design -> build -> test
- waterfall model:
- 软硬件协同开发
- Hierarchical HW/SW flow: 抽象层细分
- concurrent engineering: 多任务并行
- 质量管理 (quality assurance)
- 验证 (Verification)
- 测试 (Test)
- Design review
- 软件开发:
嵌入式系统的计算核心: 处理器
考虑设计周期、灵活性、成本,嵌入式系统的处理器可以分为以下几类(可以理解为,在软件编程和硬件实现之间折衷):
- General-purpose processors (GP/MCU/单片机)
- Application-Specific Instruction-set Processors (ASIP): 可编程的指令集处理器,介于通用处理器和ASIC之间
- Application-Specific Integrated Circuit (ASIC): 全定制
主要讨论的是通用处理器. 处理器简单表示为时序逻辑与组合逻辑的模型, 时序逻辑是其中的寄存器与pc(还有外面的主存), 组合逻辑是ALU等计算单元, 一条指令经过取指,解指/译码,执行,写回的过程
- 取指: 从主存取指令(形式为opcode(rd,op1,op2,imm),其中op1,op2,imm不一定有)
- 解指: 弄明白要干什么, rd,op1这些都是什么
- 执行: 算出来result = opcode(…)
- 写回: 寄存器rd = result 一条指令结束, 时序逻辑更新
计算机架构
- von Neumann架构: 存储程序计算机,数据和指令存储在同一存储器中,CPU通过总线访问存储器
- Harvard架构: 数据和指令存储在不同的存储器中,CPU通过不同的总线访问存储器, 可以同时访问两处内存(带宽),no self-modifying code
指令集架构
| CISC (Complex Instruction Set Computer) | RISC (Reduced Instruction Set Computer) |
|---|---|
| 变长指令 | 定长指令(不一定!) |
| 每条指令可以完成多种操作 | 每条指令完成单一操作(利于流水) |
| 多种寻址模式 | load/store访存 |
寻址模式有立即寻址(直接在指令中给出操作数的值,也就是立即数), 寄存器寻址(操作数在寄存器中), 直接寻址(操作数的地址在指令中以立即数的形式给出), 间接寻址(地址存储在寄存器或内存中), 相对地址(操作数的内存地址=pc+立即数给出的偏移量); RISC支持的少点
一个好的架构设计出来后,可以根据不同的需求和场景,做出不同的实现版本(微架构),比如不同的主频、总线宽度、缓存大小等
- ARM: ch2 25
- TI C55x
- RISC-V
设备与输入输出
CPU与设备通过总线沟通
graph LR;
A["CPU"]
B["status reg"]
C["data reg"]
D["analog device"]
A-->B;
B-->A;
A-->C;
C-->A;
B-->D;
C-->D;
- x86有专用的I/O指令(in, out), 这是端口映射
- ARM,RISCV通过内存映射I/O (memory-mapped I/O)来访问设备, 使用load/store指令
由于CPU一直等待设备的信号很低效,因此可以让设备在需要的时候发起中断,CPU做出对应的响应.
/* 举例,输入传入字符IN_DATA,处理程序放入buffer,写入输出设备OUT_DATA */
void input_handler() {
char achar;
if (full_buffer())
error = 1;
else { /* read the character and update pointer */
achar = peek(IN_DATA);
add_char(achar);
}
poke(IN_STATUS,0); /* reset status to initiate next transfer */
/* if no characters waiting, buffer was empty, start a new output transaction for newly-arrived character */
if (nchars() == 1) { /* 1 character in buffer */
poke(OUT_DATA,remove_char()); /* send character */
poke(OUT_STATUS,1); /* turn device on */
}
}
void output_handler() {
if (!empty_buffer()) { /* start a new character */
poke(OUT_DATA,remove_char()); /* send character */
poke(OUT_STATUS,1); /* turn device on */
}
}
特权级与异常处理
处理器通常有多种特权级,如用户模式(user mode)、监督模式(supervisor mode)、机器模式(machine mode),不同特权级可以访问不同的资源和执行不同的指令. 例如,用户程序运行在用户模式下,不能直接访问硬件设备,只能通过监督模式下的系统调用.
graph LR;
A["User mode: user program"]
B["Supervisor mode: OS"]
C["Machine mode: BIOS"]
A--trap-->B;
B--trap-->C;
B--sret-->A;
C--mret-->B;
- 何为中断?
- 同步例外(exception): 指令导致的中断, 如非法指令(illegal instruction)、地址对齐错误(misaligned access)、页缺失(page fault)、环境调用(ECALL)
- 异步中断(interrupt): 设备发起的中断, 如键盘输入、定时器中断等
- 自陷(trap): exception和interrupt请求更高的特权级处理的机制
这似乎是riscv的
graph LR;
A["Async. Exceptions"]
B["Sync. Exceptions"]
C["trap"]
D["trap handler"]
E["I/O interrupt"]
F["timer interrupt"]
G["software interrupt"]
A-->C;
B-->C;
C-->D;
E-->A; F-->A;
G-->B;
- 中断处理的两大机制:
- 中断向量表(interrupt vectors): 中断处理程序的入口地址存储在中断向量表中,CPU根据中断来源查找对应的处理程序. 设备中断时向CPU发送中断号,CPU查找中断向量表,跳转到对应的处理程序
- 中断优先级(interrupt priorities): 高优先级的中断会mask和打断低优先级的中断
- 中断处理流程:
- 标记中断: 某个正准备处理的中断凭优先级轮到了,保存异常处PC,设置异常来源
- 设置本次中断: PC被设置为对应的处理程序入口;(保存原来的中断使能,并设中断使能信号为0);(保存原来的特权级,切换到更高的特权级)
- 中断处理程序: 保存寄存器到栈,执行处理程序,恢复寄存器
- 恢复中断设置: 2的逆操作
中断除了处理本身的时间,中断前后也是需要时间准备的(要保存与恢复状态,设备与CPU通信中断号),也会耽误分支跳转,还有现代处理器采用的流水线和缓存也会miss. 不幸! 这些时间延迟大多不受控,但我们可以通过写汇编少动几个寄存器来省点时间.
举例: ARM的中断
- 分为FIQ (Fast Interrupt Request)和IRQ (Normal Interrupt Request), FIQ优先级更高,可以打断IRQ
- CPU需要保存PC, 复制CPSR到SPSR, 设置CPSR来记录中断, 设置PC为中断向量表中的地址; handler最后需要逆操作, 恢复PC和CPSR, 清除中断屏蔽标志
- 最坏的情况响应中断就需要27个周期: 2个周期同步外部请求, 20个周期完成手头的指令, 3个周期data abort, 2个周期进入中断处理程序
这也许是arm的
graph LR;
A[FIQ]
B[IQR]
C[Interrupt]
D[Exception]
E[Trap]
F["Async Exception"]
G["Sync Exception"]
A-->C;
B-->C;
C-->F;
E-->G;
G-->D;
F-->D;
内存机制
存储器的层次结构具有这样的特点: 顶层小而快(贵啊), 底层大而慢, 实现大而快的等效效果.
graph LR;
A["register(CPU)"]
B["cache(CPU SRAM)"]
C["memory(DRAM)"]
D["disk(device)"]
A-->B;
B-->A;
B-->C;
C-->B;
C-->D;
D-->C;
缓存
访问内存缓慢, 因此需要缓存放指令和数据, 省的CPU苦等. (不能真去 load/store 内存啊)
我们考虑的性能指标:
- 缓存命中率 $t_{avg} = ht_{cache} + (1-h)t_{main}$
- compulsory miss: 没用过的内存真没有
- conflict miss: 组相连映射时,两数据块抢一个地方
- capacity miss: 缓存不够大
- (假设写穿) 访存延迟 = 访存操作数目/程序 * 缓存失效率 * 失效代价
| cache set | cache block | tag | field | valid |
|---|---|---|---|---|
| N * cache block (N-way/bank) | 缓存块包括 | 映射的是哪块内存 | 存数据 | 有效标志 |
| address | tag | index | block offset |
|---|---|---|---|
| 缓存地址包括 | 选择数据块(hit?) | 选择组 | 选择数据 |
流程: CPU需要访问某个数据时, 首先根据地址的 index 部分选择一个组; 在选定的组内, 检查每个缓存块的 tag,以确定是否有匹配的数据块;如果找到匹配的块(hit!), 直接读取 offset 的数据;如果没有(miss!), 从主存中加载数据更新缓存
- 映射结构: 相连提升缓存命中率,但更复杂且访问慢; 数据块太大失效代价增加
- 直接映射(direct mapped)/一路组相连: cache地址相同的数据块都映射到缓存的一个确定位置, cache地址 = (块地址) mod (cache中数据块数量)
- 组相连(set associative): 原来放在同一个位置的数据块现在映射到确定组的任意路, cache组数 = (块地址) mod (cache中组数)
- 全相连(fully associative): 数据块可以映射到缓存的任意位置, 需要查找所有缓存块
- 写操作
- 写穿透(write-through): 每次写操作都更新缓存和主存, 费时.
- 写返回(write-back): 只更新缓存, 当缓存块被替换时才更新主存
- 使用buffer(减少失效损失), 写入cache时也写入buffer, 再异步写入主存
- 替换策略(降低失效率): 随机替换, 最近最少使用(LRU), 先进先出(FIFO), 最不经常使用(LFU)
虚拟内存
操作系统将不常用的数据页存储在硬盘上, 通过将程序的逻辑地址(上层看到的地址)空间映射到物理内存(内存条上的实际地址), 允许程序在运行时使用比实际物理内存更大的地址空间.
- 分段与分页
- segment由page组成
- page: 将物理内存划分为固定大小的块
- 页表记录物理地址页与逻辑地址页的映射
- TLB (Translation Lookaside Buffer): 用于加速虚拟地址到物理地址的转换, 存储最近使用的页表项
- segment: 将程序的逻辑地址空间划分为不同大小的段,每个段代表程序的一个逻辑部分,如代码段,数据段,堆栈段
缺页: 要的虚拟内存页不在物理内存中. 段错误: 没给程序分这段, 基本就是指针越界了
评估处理器设计
性能
$\text{performance} = \frac{\text{time}}{\text{prog.}} = \frac{\text{instruction}}{\text{prog.}}\times\frac{\text{cycle}}{\text{instruction}}\times\frac{\text{time}}{\text{cycle}}$
- $\frac{\text{instruction}}{\text{prog.}}$ 编译优化,指令集设计
- $\frac{\text{cycle}}{\text{instruction}}$ 优化体系结构,增加InstructionPerCycle
- $\frac{\text{time}}{\text{cycle}}$ 优化电路关键路径,后端物理设计,增加主频 (EDA)
例如, 流水线设计虽不改变一条指令的latency, 可以提高throughput(IPC=1)且频率高, 通过增加电路提高性能; 分支引发停顿,访存时延(尤其是cache miss)会耽误流水效率
功耗
功耗源包括:
- 浪涌(启动)功耗: 滤波电容充电, SRAM FPGA配置
- 静态功耗: 待机功耗, 漏电流
- 动态功耗: 最主要, $P_{dynamic} = S C_L V^2{DD} f{clk}$
针对的系统级与体系结构级低功耗策略:
- (根据CPU活动)降低工作电压/多电压
- (根据CPU活动)降低工作频率/多频率
- (根据CPU活动)关闭不用的模块
- enable/disable
- 电源门控
- 时钟门控
- 异步设计(自定时)
- 缓存(考虑cache太小/太大会怎么样)
具体如何评估CPU活动是否指示着进入低功耗模式?
- 可能损失的时间和能量
- 分步进行, 状态机
运行在处理器上的软件
CPU看到的软件就是指令, 大的数据块(数组)会被放进内存, 小的数据(局部变量)会出现在指令的立即数与寄存器. 内存里的指令与大数据块会被刷新到缓存, 因此写程序需要考虑缓存的心情
描述控制与数据
简单模型: 状态机
描述系统控制
简单模型: 串行缓存
信号处理, 例如FIR
for (f=0, ibuff=circ_buff_head, ic=0;\
ic<N; ibuff=(ibuff==N-1?0:ibuff++), ic++)
f = f + c[ic]*circ_buffer[ibuf];
(Control-)Data Flow Graph
控制-数据流程图
flowchart TD
A["x=1"] --> B{"x<100"};
B -- T --> C["x+=1"];
C --> B;
B -- F --> E["end()"];
代码上板
交叉编译 cross-compile
流程
graph LR;
A[source code]
B[CDFG]
C[instructions]
D["instructions--"]
A--parse-->B;
B--translate-->C;
C--"optimize"-->D;
编译器参数
编译,解释,与JIT编译 编译: 编译完跑 解释: 边跑边解释 JIT编译: 边跑边编译小段代码
汇编 assemble
从汇编程序(.s)产生目标机器语言模块(.o), 翻译扩展指令, 把标签,变量等符号生成出相应的地址,数据
符号表像这样:
Symbol table '.symtab' contains 28 entries:
Num: Value Size Type Bind Vis Ndx Name
1: 80000000 0 SECTION LOCAL DEFAULT 1
6: 00000000 0 FILE LOCAL DEFAULT ABS add.c
8: 80000108 1 OBJECT LOCAL DEFAULT 2 mainargs
10: 80009000 0 NOTYPE GLOBAL DEFAULT 4 _stack_pointer
15: 80009000 0 NOTYPE GLOBAL DEFAULT 4 _heap_start
20: 80000000 0 FUNC GLOBAL DEFAULT 1 _start
22: 80000028 180 FUNC GLOBAL DEFAULT 1 main
23: 80000109 0 NOTYPE GLOBAL DEFAULT 2 _data
27: 8000020c 32 OBJECT GLOBAL DEFAULT 4 test_data
链接 link
把目标代码和已经存在的机器语言模块(如函数库或其他程序)等“拼接”起来, 调整地址
- 静态链接(.a)
- 动态链接(.so, e.g.运行时库), procedure linkage(函数地址动态解析)
加载 load
调试与验证
- 调试方法
- host用cross debugger, 打断点(subroutine call to the monitor, like interrupt); MCU接个in-circuit emulator
- logic analyzer (oscilloscope array)
- boundary scan: 将特定信号注入扫描链检测硬件是否故障
- real-time debug中, 驱动的bug可能会导致UB且time-dependent
- 验证方法
- black box: 源码不可见, 大量样例
- 随机测试
- 回归测试
- clear (white) box: 对照代码测, 这样可以看到具体的运行路径与中间值(controllability & observability), 可以保证测试覆盖率
- 圈复杂度 (Cyclomatic complexity): 衡量模块判定结构的复杂度
- 分支测试 (Branch testing): 测试所有分支跳转的条件true & false
- 域测试 (Domain testing): 理想情况测试所有输入域, 重点测边缘
- 循环测试 (Loop testing): 对循环, 可以完全跳过/跑一次/跑多次
- black box: 源码不可见, 大量样例
评估与优化
程序性能评估需要综合考虑硬件系统的特性(流水线,缓存)与软件程序的行为
- measurement-driven
- 评估性能可以通过仿真,真机跑分(样例程序计算耗时); execution time = program path + instruction timing, 其中不同输入影响path跳转, instruction timing则取决于指令类型与硬件特性(例如,乘除存取指令需要多个时钟,不适应流水线与缓存策略的指令组合需要额外的时间)
- 实际上不能穷尽输入来找到最佳/最劣情况,也不能看到低层次的状态
- 性能不是一个固定值,不同的数据输入和状态跳转有average-case/worst-case/best-case execution time的不同
- trace-driven
- 在评估程序中加上打印trace的功能,用于cache分析
- physical measurement
- 适合有外界实时输入的系统
举例, 大数组的缓存冲突 5-88
程序的尺寸虽对计算机不算什么瓶颈了, 也是嵌入式必须考虑的
- 优化尺寸可以节省内存, 从而节省功耗
- data方面, 多复用数据, 用指令生成数据
- instruction方面, 避免内联函数(这样没有跳转不复用指令块), 选RISC的CPU, 用专用指令
数据结构
5-46
软硬件协同开发
硬件平台: 外设与互连
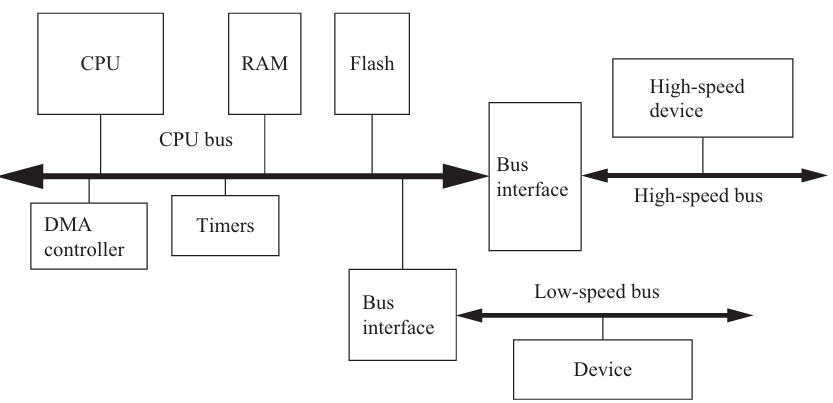
外设和处理器挂在总线上, 分布式系统
总线
总线是一组共用的线和统一的协议, 通信CPU与外设或者外设与外设. 复杂系统会有多条总线, 分别连接不同性能需求,不同功能类别的设备.
比如, CPU和内存通过高速总线(AHB)连接, 而低速I/O设备通过低速总线(APB)连接
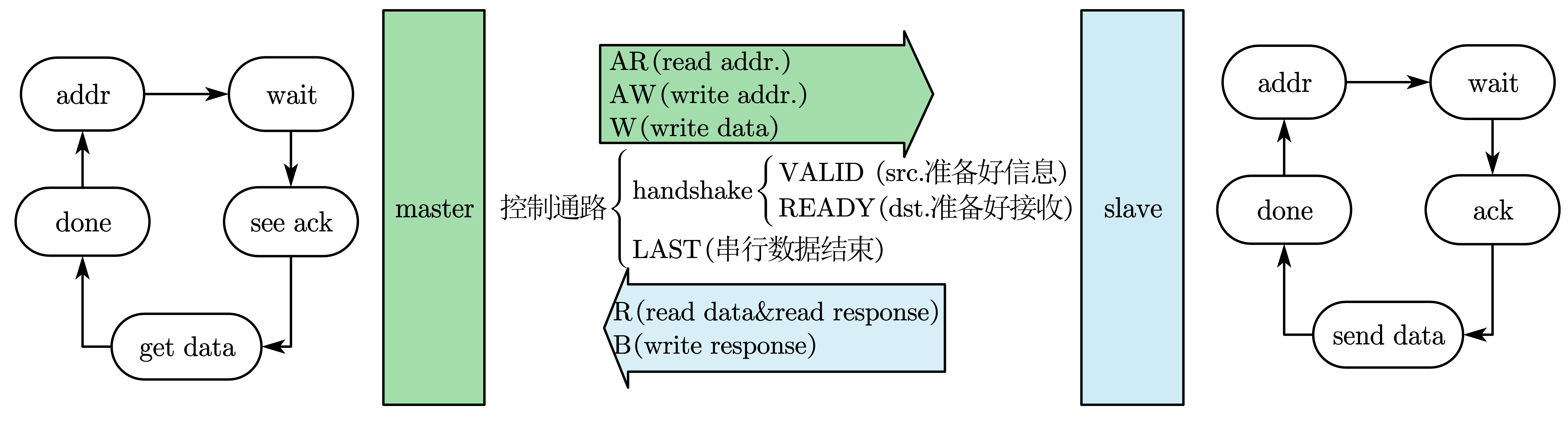
总线的一次握手:
- Device 1 raises enq.
- Device 2 responds with ack.
- Device 2 lowers ack once it has finished.
- Device 1 lowers enq.
- DMA: CPU设置DMA控制器, DMA控制器直接访问内存, CPU不参与数据传输, DMA传输期间总线被占用
仲裁
总线是公用的. 但是显然不能大家同时用. 那么某一个时刻究竟归谁用?
- fixed: 总线的访问权按照预先定义的顺序分配给各PE, 适用于实时性要求高的
- round-robin: 轮换各PE的使用优先级, 适用于公平性要求高的 一根总线显然不大好用了. CrossBar(Xbar)是一个大对照表, 交叉连接诸方向, 快速处理多个数据流, non-blocking但是大; Multi-stage networks是开关级联, blocking但小
存储
- SRAM: 缓存, Static RAM is faster, less dense, consumes more power
- DRAM: 内存, Dynamic RAM is dense, requires refresh
- flash: 比如U盘,单片机里的闪存, a field-programmable ROM, electrically erasable, must be block erased; Random access, but write/erase is much slower than read; NOR flash is more flexible (read by word), NAND flash is more dense (read by page)
I/O设备
软件系统: 抽象层与精妙控制
嵌入式软件与平时用的软件有什么区别 嵌入式软硬件的关系紧密, 根据需求, 软件对硬件选择提出要求, 可以用评估板进行测试看看能不能跑起来, 再自己打板; 嵌入式对资源和实时性有很高的要求
操作系统
操作系统抽象底层的I/O为文件, 内存与I/O为虚拟内存, CPU与这些外设的占用为进程. 其自动加载安排程序的运行, 为用户程序提供简单统一而安全的平台, 切换进程以实现并发运行的效果(其实是时分复用交错运行), 进程所看到的主存即虚拟内存
- 任务 task: 要执行的程序, a functional description of a connected set of operations, a collection of processes; 这些任务的速度要求(对速度要求不高的任务只要难得运行一次,实时性强的则不可延误),同步或异步(涉及到I/O), 存在差异, 因此需要管理进程以保证即不浪费也不延误
- 进程 process: 操作系统对运行程序的抽象, 每个进程有各自的内存栈和寄存器, 通过上下文切换, 进程交替进行, 系统就可以同时运行多个程序
- 线程 thread: 进程的执行单元, 并行的线程之间共享数据, 多线程使得程序运行的更快
进程的调度与进程间通信
学会画task graph (6-15)
进程的状态跳转:
graph LR;
A["执行 execute"]
B["等待 wait"]
C["就绪 ready"]
A--"need data"-->B;
B--"get data&CPU"-->A;
B--"get data"-->C;
C--"need data"-->B;
A--"preempted"-->C;
C--"get CPU"-->A;
进程的切换是上下文切换和调度相关的评估, 但是下面的计算默认不考虑overhead
- 讨论进程的安排
- CPU在偷懒吗?
- 总共$n$个任务, $\tau_i$为第i个进程的周期, $T_i$为需要的计算时间(每$\tau_i$必须执行$T_i$的任务i)
- CPU的利用率 $U=\frac{CPU\ time\ for\ useful\ work}{total\ available\ CPU\ time}$
- CPU来得及吗?
- 及时完成任务可行性要求 $\tau_1 \ge \sum_{i}{T_i}$
- 超周期 Hyperperiod: 任务周期的最小公倍数(least common multiple). 从一个critical instant开始, 如果一个超周期可行, 就全部可行
- 调度策略: 分为抢占(preemption)与轮询(poll)
- Rate-monotonic scheduling (RMS): 静态调度, 周期越短赋予越高优先级. CPU的利用率又可以表示为 $U= \sum{\left( \frac{T_i}{\tau_i} \right)}=\frac{\sum{(CPU \ time\ of\ i)}}{hyperperiod} < n(2^{1/n}-1)$, 注定无望100%
- Earliest-deadline-first (EDF): 动态优先级, 越来不及的赋予越高优先级, 理论可以100%利用率, 但可能赶不上ddl, 还费资源
- 周期静态(Cyclostatic) / 时分多址(TDMA): 基于LCM调度, CPU利用率不变(且高), 不能处理意外负载. CPU的利用率又可以表示为 $U= \frac{\sum{T_i}}{TDMA\ period}$
- 轮询(Round-robin): 按照相同的顺序检测各个进程是否就绪,如果当前进程不干,就会直接执行下一个. 调度周期即超周期. 可以处理很多甚至意外负载
- CPU在偷懒吗?
- 要是真的调度不好了? (参考slack为负怎么办)
- ($\tau_i$) 改ddl
- ($T_i$) 减少进程需要的计算时间
- ($f_{clk}$) 换个好CPU
- 还有一些乱七八糟的问题
- 优先级反转 priority inversion: 低优先级进程由于原子性霸着共享的资源, 高优先级跑不了, 导致的死锁
- 数据依赖
- 上下文切换时间

- 进程间通信 6-53 6-85: 进程通过OS通信传数
- blocking(发送的进程等回复), non-blocking(发送的进程继续)
- 共享内存 (shared memory)
- 2个进程同时写一个内存位置的冲突 -> 原子操作(atomic test-and-set)不可分割, 只能全部失败/全部成功; SWP指令读内存,测试,写入
- 通道传信 (message passing)
UML
出现的术语: task, process, thread, multi-rate, real-time, release time, deadline(hard/soft/firm), rate & period, initiation time & interval, hyperperiod, response time, critical instant & region, semaphores
系统性能分析
- 通信带宽:
- $T_{basic}(N)=\frac{(Data\ transfer + Overhead)(Number\ of\ data)}{(bus\ Width)}$
- $T_{burst}(N)=\frac{((Burst) (Data\ transfer) + Overhead)(Number\ of\ data)}{(Burst) (bus\ Width)}$
- 通信的瓶颈在于内存还是总线?计算
- 通过提高并行性提高效率: 一次传多个, DMA, fpga
- 能量与功耗
- 一般来说, 软件high performance = low energy, speed-energy之间没有什么trade-off的余地. 主要考虑: 寄存器的高效使用, 缓存尺寸与冲突, 展开循环与函数嵌套(内联), 流水线优化
- 操作系统通过关掉一些单元来降低功耗, 而关与开的操作也是额外耗能的. 因此需要合理调节, 简单的功耗管理策略有 request-driven 与 predictive shutdown, 前者一旦有请求就开启, 后者预测多久会有请求
- Advanced Configuration Power Interface: 在mechanical off, soft off, sleeping state, working state状态之间切换
- RTOS: 6-95
加速
加速在于并行. 如果存在多个CPU核, 线程真的是并行的; 如果是单核, 线程是时分复用表现出的并行效果. 通过软件调整程序使之适于并行, 即调度; 通过硬件的功能分离使之支持并行 并行需要担心数据依赖与冲突, 因为系统终究不是完全并行的, 重叠部分会出问题. 需要从软件硬件, 从上下层次, 去考虑, 比如指令,I/O,总线与内存
多处理器
为什么要多处理器? 通过分离通用功能与特殊功能, 各适其所, 就不需要为提升一点性能付出昂贵成本, CPU的任务调度更合理, 突破单CPU的利用率与性能瓶颈, 优化功耗; 此外, 实时I/O与数据流更有优势
多处理器的通信可以参考多进程通信
加速器与协处理器有什么区别 协处理器执行被发送的指令 加速器则如设备, 受状态寄存器控制
评估加速器
加速器需要花时间传输输入输出数据, 运行计算, 与主CPU同步, 总执行时间可以表示为 \(\begin{array}{l} t_{acc}& =t_{in}& +t_{ex}& +t_{out}\\ & input& compute& output\\ \end{array}\) 对$n$轮计算, 加速效果(speedup)为$S=n\left( t_{CPU}-t_{acc} \right)$
这里可以参考进程部分, 单线程即blocking, CPU等待加速器算完, 总时间为所有路径之和; 多线程即non-blocking, CPU继续运行, 总时间取决于最长路径. 这是需要软件调度的
7-29 给出了例子 一旦输入数据全部准备好(而且输出不会修改其他计算需要的输入), 这个计算就可以开始; 限制条件来自n个计算单元与1个通信/内存/IO, 既然通信这些的总时间不能削减, 就边算边传, 争取让总时间=通信时间